
Nuovo esemplare di squalo bianco individuato nei fondali marini dalle dimensioni enormi, sembra un dinosauro
Continuano le scoperte di nuove specie di animali e piante da parte degli scienziati di tutto il mondo. I nuovi avvistamenti sono sempre una buona notizia per la comunità scientifica che lavora costantemente per cercare di preservare la biodiversità sul nostro pianeta.
Si calcola che l’azione antropica abbia velocizzato i cicli di estinzione di animali e piante di oltre 10mila volte. Questo vuol dire che il primo nemico per l’ecosistema è proprio l’uomo che attraverso il proprio intervento va a incidere in maniera importante sugli equilibri dell’ecosistema.
Fortunatamente a volte ritornano: può capitare che alcune specie che si credevano completamente scomparse da determinati territori tornino ad apparire dopo anche molto tempo. E’ il caso del castor fiber, un esemplare di castoro che è ricomparso sulle sponde del fiume Tevere, dove non si vedeva da oltre 500 anni.
Fortunatamente anche il progresso scientifico ha permesso di evitare la scomparsa di alcune specie, come è accaduto nel caso del rinoceronte bianco di cui sono rimasti al mondo solo due esemplari, entrambe femmine. Gli scienziati sperano di poter salvare la specie attraverso la fecondazione assistita, utilizzando le cellule dell’ultimo esemplare maschio scomparso nel corso dell’ultimo anno.
Lo squalo bianco più grande del pianeta
Il monitoraggio riguarda anche gli oceani, dove ultimamente è stato avvistato un particolare esemplare di squalo bianco, visto l’ultima volta negli anni ‘90. Lo squalo bianco normalmente misura intorno ai 4,5 metri di lunghezza e può arrivare a pesare come un’utilitaria, circa 2.300 chilogrammi.
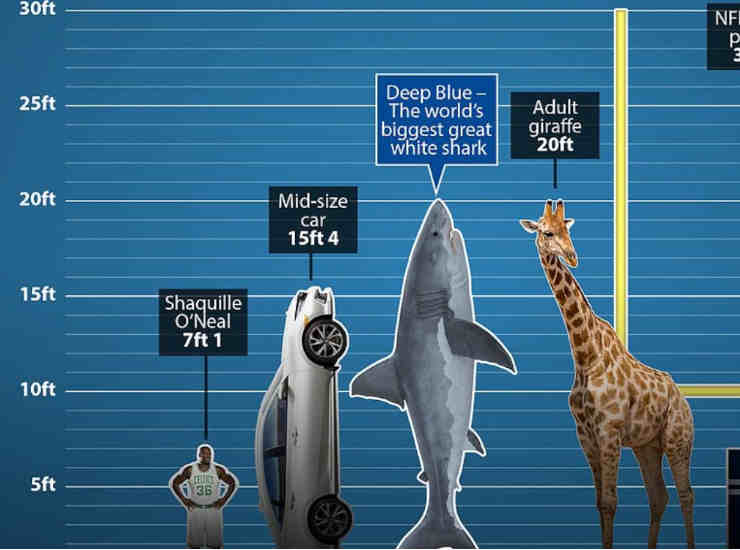
Questo esemplare, in particolare, chiamato Deep Blue è uno squalo bianco femmina, che ha stupito gli esperti non solo per le grandi dimensioni, la sua lunghezza supera i sei metri, ma anche per l’età, poiché secondo gli scienziati potrebbe aver superato i 50 anni. Un caso atipico, nonostante gli squali bianchi possano vivere tra i 30 e 70.
I biologi marini hanno monitorato a lungo l’esemplare avvistato per capire se si trattasse proprio di Deep Blue e, a quanto pare, oltre alle dimensioni fuori dal comune, corrispondono anche le cicatrici rilevate sul corpo dell’animale. Inoltre, le segnalazioni arrivano sempre dalla stessa area dell’isola messicana di Guadalupe, dove Deep Blue torna ogni due anni per riprodursi. E’ importante considerare che monitorare gli spostamenti non è semplice, in quanto lo squalo bianco si sposta molto velocemente e può raggiungere una velocità fino a 24 chilometri all’ora. Addirittura alcuni esemplari continuano a nuotare anche mentre dormono.